
骷髅手「盘核桃」见过没?
这个神奇的「手」来自Meta刚刚发布的AI平台MyoSuITe。
嗯&hellIP;&hellIP;终结者的即视感有了。
小扎:元宇宙的「阿凡达」们有救了
传统行业中流行着这么一句话,「一流企业做标准,二流企业做品牌,三流企业做产品」
虽然这话有点绝对,很多参与制定行业标准的一流企业,品牌和产品更是一流的,但这句话的背后主要凸显的是「标准」对于一个行业有多重要。
谁掌握了标准,谁就有了制定游戏规则的话语权,谁就有在业内「坐庄」的潜力。
来到AI时代,科技巨头们同样在争夺「标准」这个业务高地,只不过换了不少新的名字,比如框架、平台、基准,多少都带了点业界标准的意思。
Meta自然也不例外。
当然,按照小扎All in元宇宙而不惜改名的这波操作,万事皆可元宇宙。
我们可以训练模型来完成复杂的动作,如转笔或转钥匙。这项研究不仅可以加速假肢、身体康复和手术技术的发展,而且还有助于我们为元宇宙开发出更真实的化身。我们将开放这些模型的源代码,以便研究人员可以使用它们来进一步推动这一领域。
好吧,没想到,下面展示的竟然是转笔,不是「抓罐子」&hellIP;&hellIP;
但,这确实有点太粗了吧!
对了,还有转钥匙。(已经习惯了,不必再吐槽了)

言归正传,虽然目前看起来模型似乎还处在一个初期阶段,但是各种细节的控制已经相当完善了。
滑动控制条伸出大拇指,然后再依次收回剩下四指,最后转动胳膊&hellIP;&hellIP;
来,给你竖个大拇指!
除此之外,如果研究能有进一步进展的话,确实可以让Meta的「阿凡达」们拥有一套解剖学上正确的骨骼和动作,而不只是单纯的可爱卡通形象。
神经和运动智能的「大一统」
生物体越聪明,所表现出来的运动行为就越复杂。
因此,需要考虑的一个重要问题是:是什么促成了这种复杂决策以及执行这些决策的运动控制?
Meta认为,开发MyoSuITe就是为了探索这个问题。
论文地址:https://dRive.Google.coM/file/d/10Le1OMOpy-Veb7n41ywRYLxyIPoGfHtt/view
MyoSuITe提供了一套肌肉骨骼模型和任务套件,用机器学习来解决生物力学控制问题。
Meta表示,MyoSuITe另一个重要意义是统一了智能的两个方面:运动智能和神经智能,并为机器学习社区开源一套全面的基准。
人类的生物力学是一个复杂的多关节、多执行器的肌肉骨骼系统。一块肌肉的收缩涉及到多个关节的弯曲运动,每个关节的运动都由多块肌肉控制。
在如此复杂的系统中,智能行为的合成和表达需要中枢神经系统和外周肌肉骨骼系统之间的有效协调,前者是由数十亿个神经元组成的网络合成决策,后者则是将这些意图转化为行动。
MyoSuITe是通过对现有模型和功能研究的深入研究而开发的,其研发基础是手臂和手的OpenSiM模型,目前已经广泛用于人类神经机械控制、人机交互和康复等领域。

MyoSuITe提供了一个测试几个生理上精确的肌肉骨骼模型的组合,具体的模型构建可分为三步:
1. 几何图形转换。包括关节的几何形状、肌肉附着点和包裹面的转换。这个步骤是在之前工作的基础上进行的。
2. 动力臂优化。优化MuJoCo中包裹面的三维位置。MuJoCo中包覆面的三维位置,以便实现与参考OpenSiM模型相匹配的力矩臂。
3.肌肉力量优化:对MuJoCo中的肌肉参数进行优化,以实现与对照OpenSiM模型相匹配的肌肉发力。经过严格的建模和验证,最终建立了三个复杂程度不同的模型。
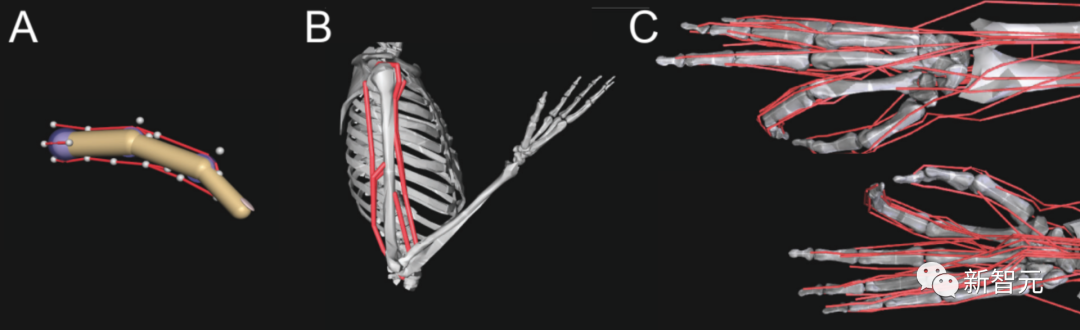
MyoSuITe中包含的肌肉骨骼模型。A:MyoFingeR(4个关节、5块肌肉),B:MyoElbow:(1个关节、6块肌肉)。C:MyoHand(23个关节、39块肌肉)。
手指(MyoFingeR): 首先建立一个简化和直观的模型,即一个4自由度(DoF)的手指(MyoFingeR,上图A),它是通过一系列简化的5个拮抗性肌肉-肌腱单元来驱动的。研究团队为其提供了简单的扭矩驱动器,以方便比较研究。
手肘(MyoElbow):一个1自由度人类肘关节的模型,基于OpenSiM的默认设置测试手臂模型,并使用多个激动剂/拮抗剂对(3个屈肌和3个伸肌)进行驱动(上图B)。
手(MyoHand):实际上包括前臂、手腕和手。灵巧的人手需要协调多块高度冗余的肌肉,这些肌肉对各种关节具有互补和拮抗作用。这个更复杂的肌肉骨骼模型由29块骨头,23个关节,39个肌肉-肌腱单元组成(上图C)。
多年来,人工智能领域一直试图通过神经结构或神经网络来模仿智能行为。而在生物力学界,主要是独立通过体内和体外研究来开发肌肉骨骼系统,以了解外周的驱动力。
有了MyoSuITe,研究人员有望在感觉-运动控制的细节上取得更大进展,依靠不同的本体感觉信号来协调全身的运动控制,这是在丰富的互动环境中表现出智能行为所需要的。

MyoSuITe的生理学上真实的肌肉骨骼模型,比现有模型的计算效率和可扩展性要高出4000倍。
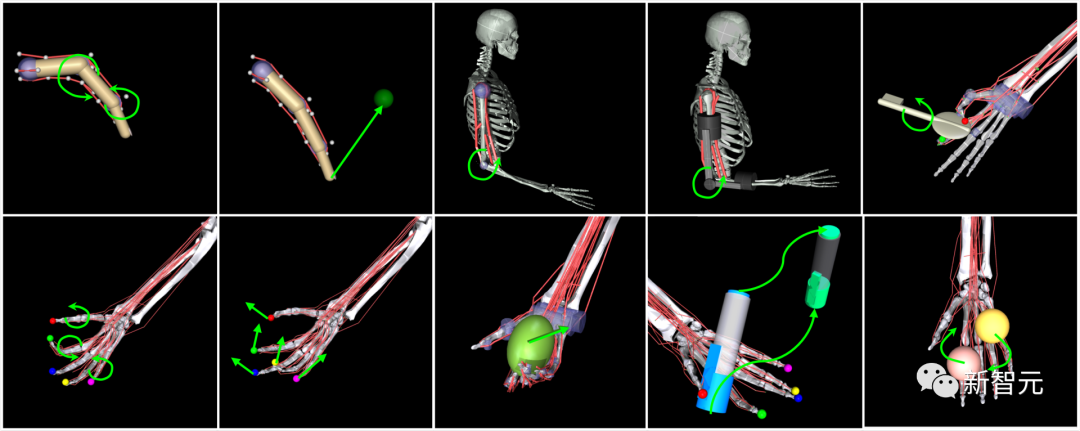
有了这么强大的资源和计算效率做支撑,什么转笔、转钥匙、单手盘核桃等自然不在话下了。
而且,这些「花活」就是为了告诉你MyoSuITe「能干什么」,未来「要干什么」,Meta也说了,主要是运动康复、假肢开发和人体工程学应用。
说不定以后的假肢,比原装的还好用?
MuJoCo开源
说起来,从AlphaGo到MuZeRo,过去机器学习算法解决的复杂问题实在是不少,但在复杂运动控制的方向上一直应用不多,Meta认为,主要原因是缺乏与外界复杂环境的互动能力。
换句话说,现有框架既没有嵌入复杂而熟练的运动任务,也没有足够的计算效率或可扩展性来满足机器学习算法的数据需求。
Meta表示,MyoSuITe有望弥补这些差距。
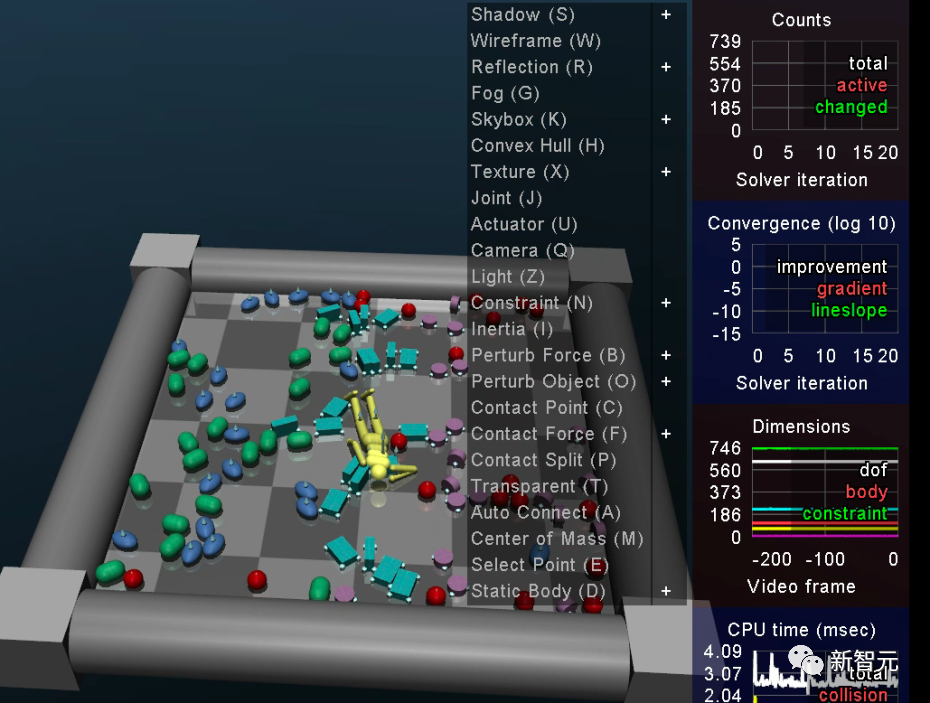
目前,MyoSuITe已经在MacOs和linux上用MuJoCo v2.1.0进行了测试。
正巧的是,DeepMind也在同日对MuJoCo进行了开源。

项目地址:https://Github.coM/DeepMind/Mujoco
MuJoCo最初由华盛顿大学运动控制实验室主任、神经科学家EMo TODoROV开发,于2015年通过创业公司RoBI LLC, 被打造成了商业产品。
2021年10月,DeepMind宣布收购MuJoCo物理模拟器,并承诺将MuJoCo作为一个免费的、开源的、社区驱动的项目进行开发和维护。
对于现在的机器人研究来说,物理模拟器是其中的关键性工具。其通常可以分为商业的闭源软件,和学术界的开源软件。
第一类对用户来说是不透明的,虽然有时可以免费使用,但不能修改,也很难理解