
这篇文章主要介绍了如何使用clion中配置ROS工程,本文给大家介绍的非常详细,对大家的学习或工作具有一定的参考借鉴价值,需要的朋友可以参考下。
一、启动法
1:命令行启动clion
sudo gedit ~/.bashrc
#在bashrc文件中加入
export PATH=”/home/gavyn/APPS/clion-2019.1.4/bin:$PATH” #地址根据自己改
#保存退出
source ~/.bashrc
#此时即可点击clion图标启动,也可以通过命令行启动,方法如下:
#在工作空间(例如:/home/gavyn/桌面/catkin_example)目录下打开终端,执行:
source devel/setup.bash
cd src
clion.sh
#关闭之前打开的工程,选择Import Project from Source,然后选择工作空间(catkin_ws)下的src目录,不要选择单个package目录。
法2:clion图标启动
编辑图标启动文件:
gedit ~/.local/share/applications/jetbrains-clion.desktop
文件里面可以看到,大概就是制定了快捷方式的图片,需要运行的命令,是否启动终端等配置。我们只需要在每次启动clion的时候加载一下bash(增加bash -i -c指令)就好了。所以将第六行改动一下,变成下面这个样子就好了。
[Desktop Entry]
Version=1.0
Type=Application
Name=CLion
Icon=/home/gavyn/APPS/clion-2019.1.4/bin/clion.svg
Exec=bash -i -c “/home/gavyn/APPS/clion-2019.1.4/bin/clion.sh” %f
Comment=A cross-platform IDE for C and C++
Categories=Development;IDE;
Terminal=false
StartupWMClass=jetbrains-clion
二、使编译过程中生成的文件位于build和devel文件夹下
默认情况下,CLion将构建输出放在自动创建的cmake-build-debug或cmake-build-release 目录中。对于ROS开发,这意味着您将在CLion和运行的控制台中拥有两个不同的版本catkin_make。
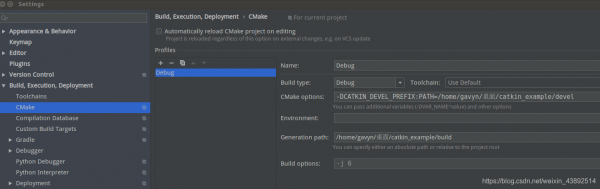
要在IDE和控制台上进行单一构建,需要将CLion构建路径设置为catkin工作区目录。为此,请转到 文件| 设置Ctrl+Alt+S| 构建,执行,部署| CMake并更改两个字段:
在生成路径中,设置workspace_folder/build。
在CMake选项中,添加-DCATKIN_DEVEL_PREFIX:PATH=workspace_folder/devel。
eg: 修改Settings->Build->CMake中的设置,将“CMake options”一栏修改为“-DCATKIN_DEVEL_PREFIX:PATH=/home/gavyn/桌面/catkin_example/devel”;将”Generation path”一栏修改为“/home/gavyn/桌面/catkin_example/build”。如下:
总结
到此这篇关于如何使用clion中配置ROS工程的文章就介绍到这了,更多相关clion配置ROS工程内容请搜索脚本之家以前的文章或继续浏览下面的相关文章希望大家以后多多支持脚本之家!